참고: 만약 \( ||\vec V_1 || = 0 \) 또는 \( ||\vec V_2 || = 0 \) 인 경우, 두 벡터 사이의 각도는 정의되지 않습니다.
원통 좌표계에서 두 벡터 사이의 각도를 계산하는 계산기 사용하기
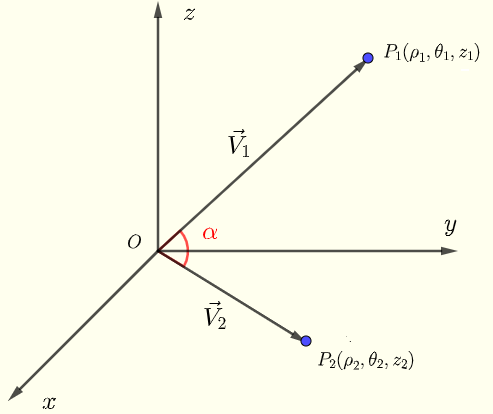
1 - \( P_1 \)의 원통 좌표 \( \rho_1 \) , \( \theta_1 \), \( z_1 \) 및 \( P_2 \)의 \( \rho_2\) , \( \theta_2\), \( z_2 \)를 입력하고 각도에 대한 원하는 단위를 선택한 다음 "계산" 버튼을 누릅니다. 필요에 따라 소수점 자릿수를 변경할 수도 있습니다; 이는 양의 정수여야 합니다.