目次
円筒座標系における2つのベクトル間の角度計算機
計算で使用される式
円筒座標系における2つのベクトル間の角度 \( \alpha \) を計算するオンライン計算機です。
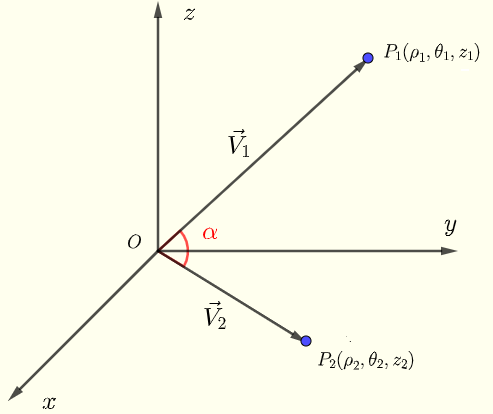
2つのベクトルの始点が円筒座標系の原点であり、終点がそれぞれ \( P_1(\rho_1,\theta_1,z_1) \) と \( P_2(\rho_2,\theta_2,z_2) \) の場合を考えます。
図1 - 2つのベクトル間の角度 \( \alpha\)
点 \( P_1(\rho_1,\theta_1,z_1) \) と \( P_2(\rho_2,\theta_2,z_2) \) の円筒座標を長方形座標に変換します。
\( x_1 = \rho_1 \cos \theta_1 \), \( y_1 = \rho_1 \sin \theta_1 \), \( z_1 = z_1\)
\( x_2 = \rho_2 \cos \theta_2 \), \( y_2 = \rho_2 \sin \theta_2 \), \( z_2 = z_2\)
ベクトル \( \vec{OP_1} = \vec V_1 \) および \( \vec{OP_2} = \vec V_2 \) はそれぞれ
\( \vec V_1 \lt x_1 , y_1 , z_1 \gt \) と \( \vec V_2 \lt x_2 , y_2 , z_2 \gt \)
\( \vec V_1 \) と \( \vec V_2 \) の内積は以下のように与えられます。
\( \vec V_1 \cdot \vec V_2 = ||\vec V_1 || \cdot ||\vec V_2 || \cos \alpha \)
従って、
\( \alpha = \arccos \left(\dfrac {\vec V_1 \cdot \vec V_2}{||\vec V_1 || \cdot ||\vec V_2 ||} \right) \)
ここで、
\( \vec V_1 \cdot \vec V_2 = x_1 x_2 + y_1 y_2 + z_1 z_2 \)
および
\( ||\vec V_1 || = \sqrt {x_1^2 + y_1^2 + z_1^2} \)、 \( ||\vec V_2 || = \sqrt {x_2^2 + y_2^2 + z_2^2} \)
注意
: \( ||\vec V_1 || = 0 \) または \( ||\vec V_2 || = 0 \) の場合、2つのベクトル間の角度は未定義です。
円筒座標系における2つのベクトル間の角度を計算する計算機の使用方法
1 - 点 \( P_1 \) の円筒座標 \( \rho_1 \)、\( \theta_1 \)、\( z_1 \) および点 \( P_2 \) の円筒座標 \( \rho_2\)、\( \theta_2 \)、\( z_2 \) を入力し、角度の単位を選択して「計算」を押します。また、小数点以下の桁数を必要に応じて変更できます。正の整数である必要があります。
\( \rho_1 = \)
1
\( \theta_1 = \)
45
度
ラジアン
\( z_1 = \)
45
\( \rho_2 = \)
2
\( \theta_2 = \)
90
度
ラジアン
\( z_2 = \)
30
小数点以下の桁数 =
5
\( \alpha = \)
(度)
\( \alpha = \)
(ラジアン)
その他の参考文献とリンク
数学計算機と解法
.
円筒座標を長方形座標に変換 - 計算機
.