Winkel zwischen zwei Vektoren in Zylinderkoordinaten - Rechner
Verwendete Formeln in den Berechnungen
Ein Online-Rechner zur Berechnung des Winkels \( \alpha \) zwischen diesen beiden Vektoren anhand ihrer zylinderförmigen Koordinaten wird präsentiert.
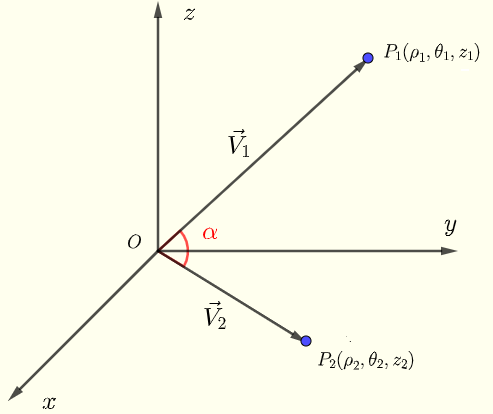
Gegeben sind zwei Vektoren, deren Anfangspunkt der Ursprung eines Koordinatensystems in Zylinderkoordinaten ist und deren Endpunkte \( P_1(\rho_1,\theta_1,z_1) \) und \( P_2(\rho_2,\theta_2,z_2) \) durch ihre zylinderförmigen Koordinaten gegeben sind.
Abb. 1 - Winkel \( \alpha\) zwischen zwei Vektoren
Konvertieren Sie die zylinderförmigen Koordinaten der Punkte \( P_1(\rho_1,\theta_1,z_1) \) und \( P_2(\rho_2,\theta_2,z_2) \) in kartesische Koordinaten \( P_1(x_1,y_1,z_1) \) und \( P_2(x_2,y_2,z_2) \) wobei
\( x_1 = \rho_1 \cos \theta_1 \) , \( y_1 = \rho_1 \sin \theta_1 \) , \( z_1 = z_1\)
\( x_2 = \rho_2 \cos \theta_2 \) , \( y_2 = \rho_2 \sin \theta_2 \) , \( z_2 = z_2\)
Die Vektoren \( \; \vec{OP_1} = \vec V_1 \) und \( \; \vec{OP_2} = \vec V_2 \) haben die Komponenten
\( \vec V_1 \lt x_1 , y_1 , z_1 \gt \) und \( \; \vec V_2 \lt x_2 , y_2 , z_2 \gt \)
Beachten Sie, dass wenn \( ||\vec V_1 || = 0 \) oder \( ||\vec V_2 || = 0 \), der Winkel zwischen den beiden Vektoren nicht definiert ist
Verwenden Sie den Rechner, um den Winkel zwischen zwei Vektoren in Zylinderkoordinaten zu berechnen
1 - Geben Sie die zylinderförmigen Koordinaten \( \rho_1 \) , \( \theta_1 \), \( z_1 \) des Punktes \( P_1 \) ein, und \( \rho_2\) , \( \theta_2\), \( z_2 \) des Punktes \( P_2 \) ein, wählen Sie die gewünschten Einheiten für die Winkel aus und drücken Sie die Schaltfläche "Berechnen". Sie können auch die Anzahl der Dezimalstellen nach Bedarf ändern; diese muss eine positive ganze Zahl sein.